Brage Alvsvåg just finished his masters thesis at Department of Informatics at UiB. The title was “Improving fish detection using efficient neural networks”, and the project was done in association with Mohn Technology using our dataset. In his project, Brage tested different ways of improving our fish detection AI, with different kinds of neural networks and post-training quantization he managed to develop some promising algorithms that might proove to be very useful for us. We are looking forwards to testing out these strategies in real life operations in the coming months!
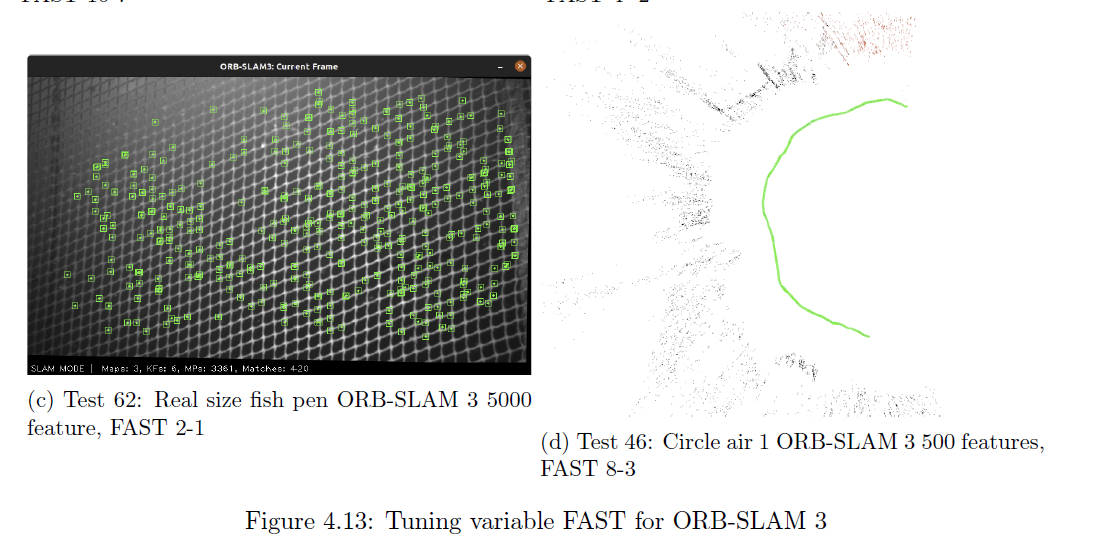
Håvard Ullaland also finished his master thesis this summer at Department of Engineering Cybernetics at NTNU. Håvards project was titled “Positioning and localization for underwater vehicle in fish pen using VSLAM”, and the work is related to our automatic net inspection tool that is supported by FHF. Håvards contribution to the project is related to navigate based on machine vision and IMU (Inertial measurement unit). The localization algoritms use the input from the machine vision and sensors to estimate where it is, and where it is going. If we succeed in only using VSLAM (Visual simultaneous localization and mapping) algoritms we can reduce the hardware cost and complexity of the system, and it will also require less setup of hardware on site before operation.
After the masters thesis was delivered Håvard started working for us full time on the project, and will continue his work on underwater localization and navigation.