The invasive species Pink Salmon (also called Humpback Salmon) has become more and more problematic in Norwegian rivers recent years. The species are originally a Pacific salmon species, but were brought to Russian rivers in an effort to create a new fisheries industry there.
The County Governor of Troms and Finnmark has established a pre-commercial procurement competition where technology firms could present their solution to detect and sort out the invasive Pink Salmon from local species like Athlantic salmon, trout and Arctic char with minimal impact on local wildlife and the environment. Along with a wide variety of projects from a lot of highly competent government agencies and institutes, this competition will be an important contribution to controlling the establishment of a pink salmon population in Norwegian rivers.
Mohn Technology partnered up with the well established American firm FISHBIO, who specialise in river barriers, weirs and other structures to manipulate fish migration paths. Mohn Technology is responsible for developing camera hardware, lighting, AI fish detection algorithms and fish sorting units, whereas FISHBIO is focusing on river barriers, fish guiding and trap compartments.
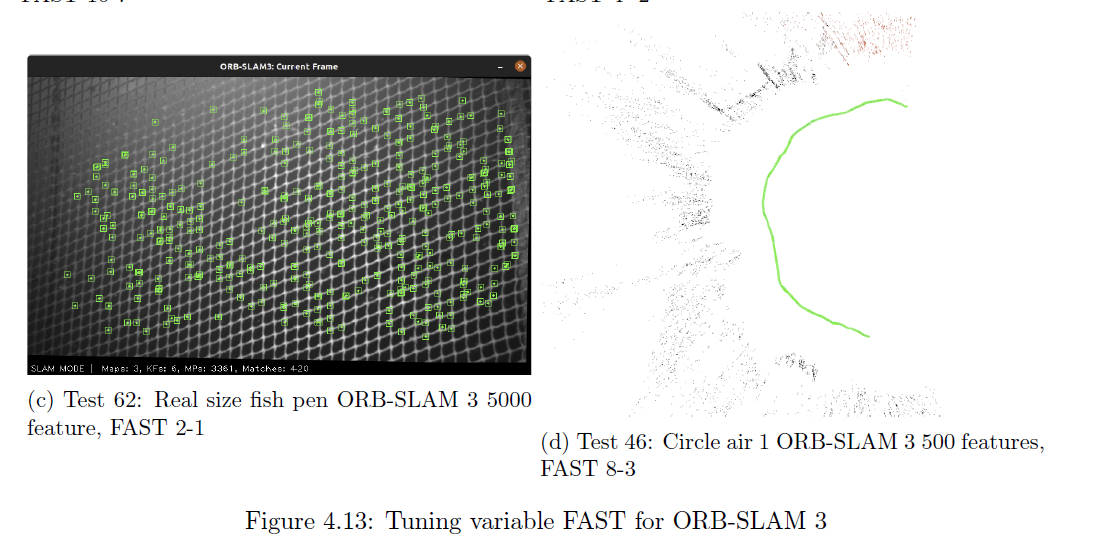
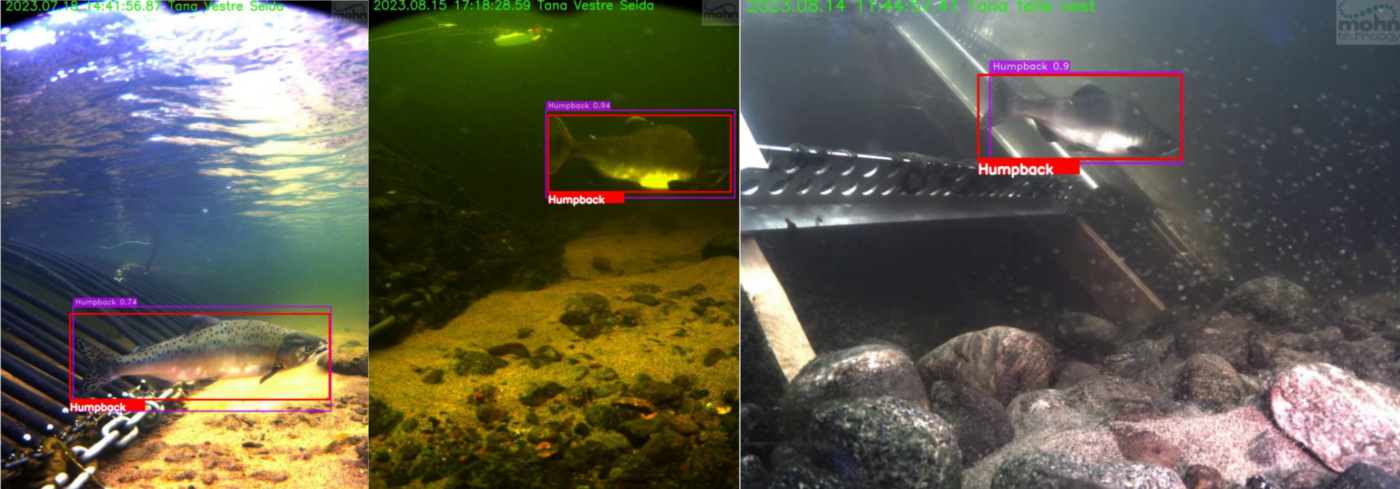
Mohn Technology has extensive experience with AI development, and our FRS cameras has been placed in many rivers and fjords in Norway over the years. In the summer of 2023 there were 4 FRS cameras in rivers in Finnmark that collected loads of data containing both native species and the invasive pink salmon.


During the first phase of the competition Mohn Technology has annotated data and developed an AI prototype algorithm that displayed an accuracy of 97% between the species pink salmon, Atlantic salmon, trout and Arctic char per frame. The camera system runs on 30 frames per second, so you will get multiple evaluations within a fraction of a second, thereby basically getting 100% accuracy under normal conditions. These examples are taken from a wide variety of background, lighting and water conditions making it much harder for the algorithms to detect and analyse species than in a tunnel based environment.
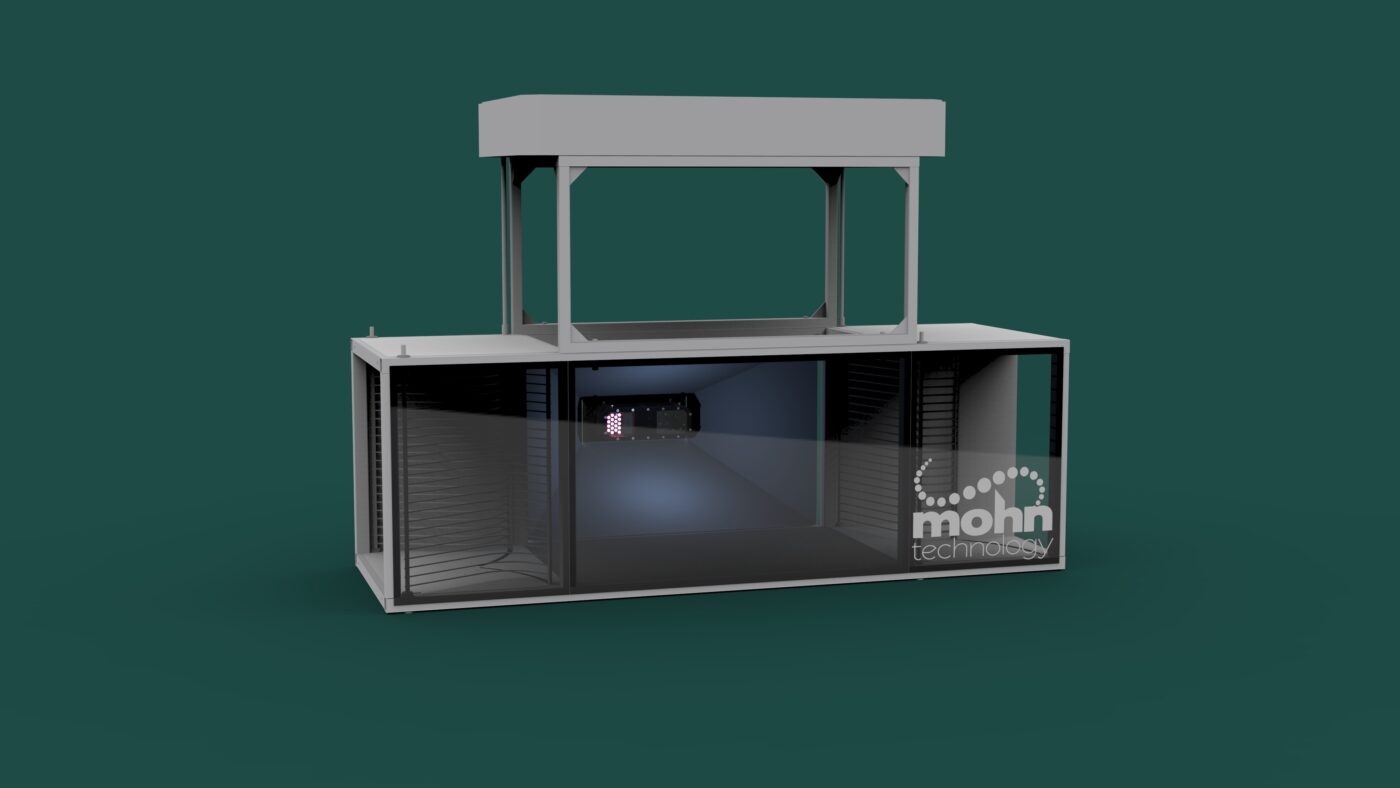
The proposed sorting concept is a modular design, where the fish are guided through a sorting channel. Inside the sorting channel, the fish are analysed using AI based machine vision algorithms. Native species are allowed to pass through the tunnel without interruption, whereas the pink salmon is guided into a waiting compartment for further processing.
We are looking forward to working with FISHBIO, local fishing associations and The County Governor of Troms and Finnmark to develop this exciting technology that will ensure that the invasive species can be used as a resource and that the native species are not interrupted in their path to spawn.