The Norwegian aquaculture news outlet, Kyst.no just published an article regarding our work with autonomous robots for inspection of aquaculture facilities.
Well worth the read, if you are interested in technology or aquaculture!

The Norwegian aquaculture news outlet, Kyst.no just published an article regarding our work with autonomous robots for inspection of aquaculture facilities.
Well worth the read, if you are interested in technology or aquaculture!
Vi ønsker å utvide teamet, og er på utkikk etter en engasjert softwareutvikler som ønsker varierte og spennende oppgaver.
Arbeidsoppgaver
Dine kvalifikasjoner og egenskaper
Vi er på jakt etter personer som innehar følgende egenskaper:
Vår tech stack:
Hva kan vi tilby:
We wish to expand the team, and are looking for a dedicated software developer who wants varied and exiting tasks.
Work tasks
Your qualifications and abilities
We are looking for people with the following characteristics and abilities:
Our tech stack:
What we can offer:

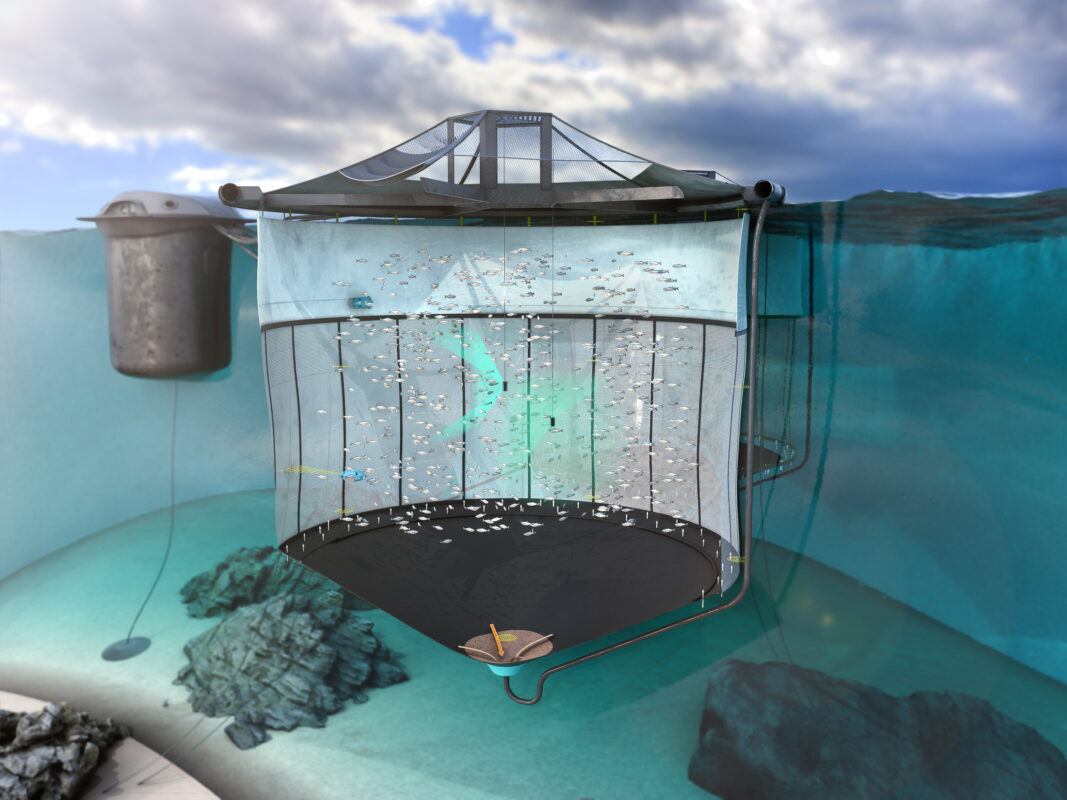
Mohn Technology is developing several autonomous underwater vehicles. One of them is an automatic net inspection drone for the aquaculture industry. The project is partially funded by FHF and will reduce the risk of escaped salmon by inspecting the facility in a safe, efficient and environmentally friendly way.
We have done most of the AUV (Autonomous Underwater Vehicle) in a computer simulation environment to quickly get a overview of how the AUV reacts to different scenarios, with wave motion, water current etc.
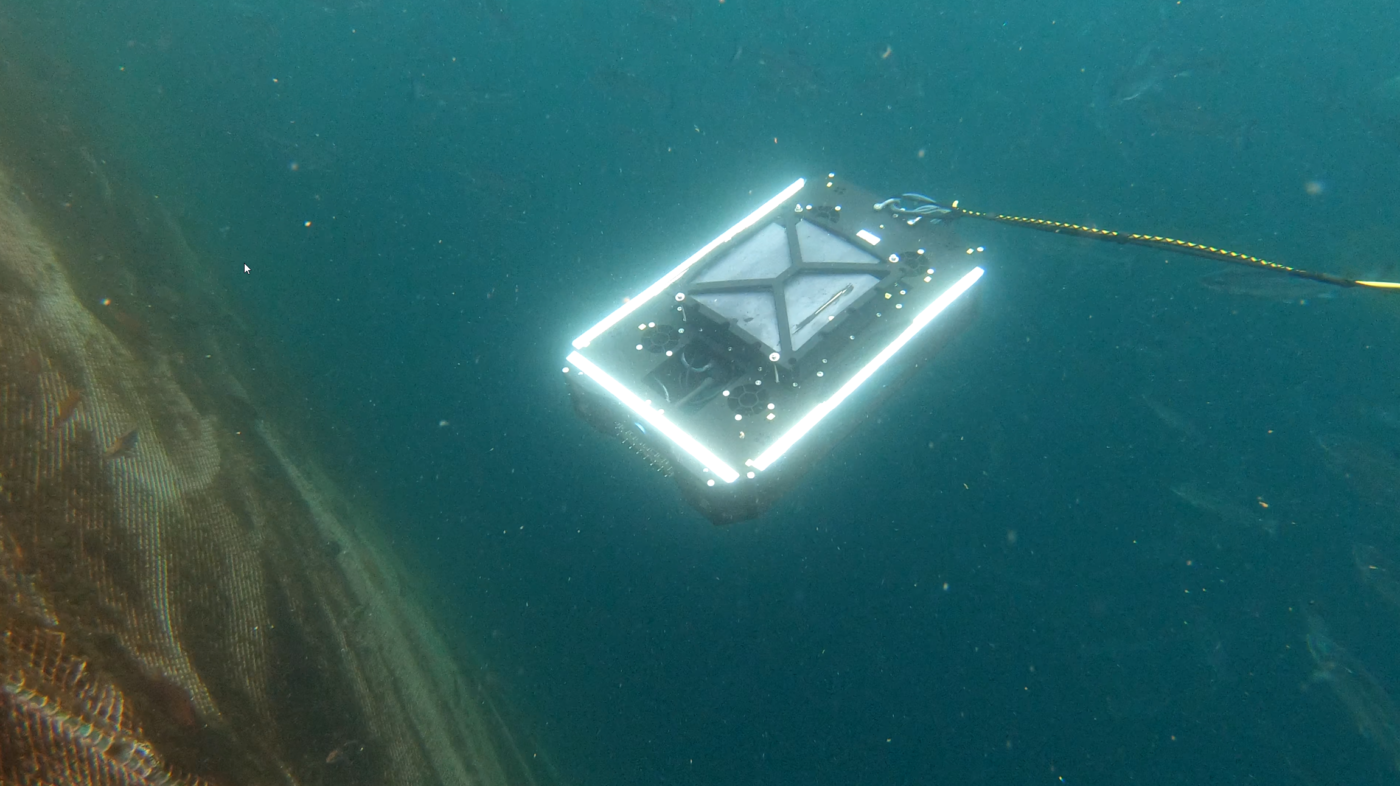
Since we do a lot of work in a simulation environment, we are able to transfer the navigation algorithms to all compatible underwater vehicles without too much extra work. In the field trial we used an existing prototype used for pelagic fisheries research, because it had a suitable stereo camera, IMU (Inertia Measurement Unit), depth sensor and onboard computer.
The umbilical is only for communication and manual override as the vehicle is battery powered. The finished product will be truly autonomous without any cable. This is done in order to reduce the risk of entanglement in a crowded net pen with numerous obstacles like ropes, sensors, cables and cleaner fish housing.

The trail was performed at an operational aquaculture facility of a Norwegian fish farmer at the west coast. Even though the facility was pretty exposed, the weather was fair and the sea was calm.

The net tracking algorithms worked well, and the test provided vital experience with real life operations in an active fish farm. We were impressed how well the algorithms manged to filter out disturbances like salmon swimming between the vehicle and the net. The salmon seemed to be very little affected by the drone, and calmly swam in close proximity to the vehicle.
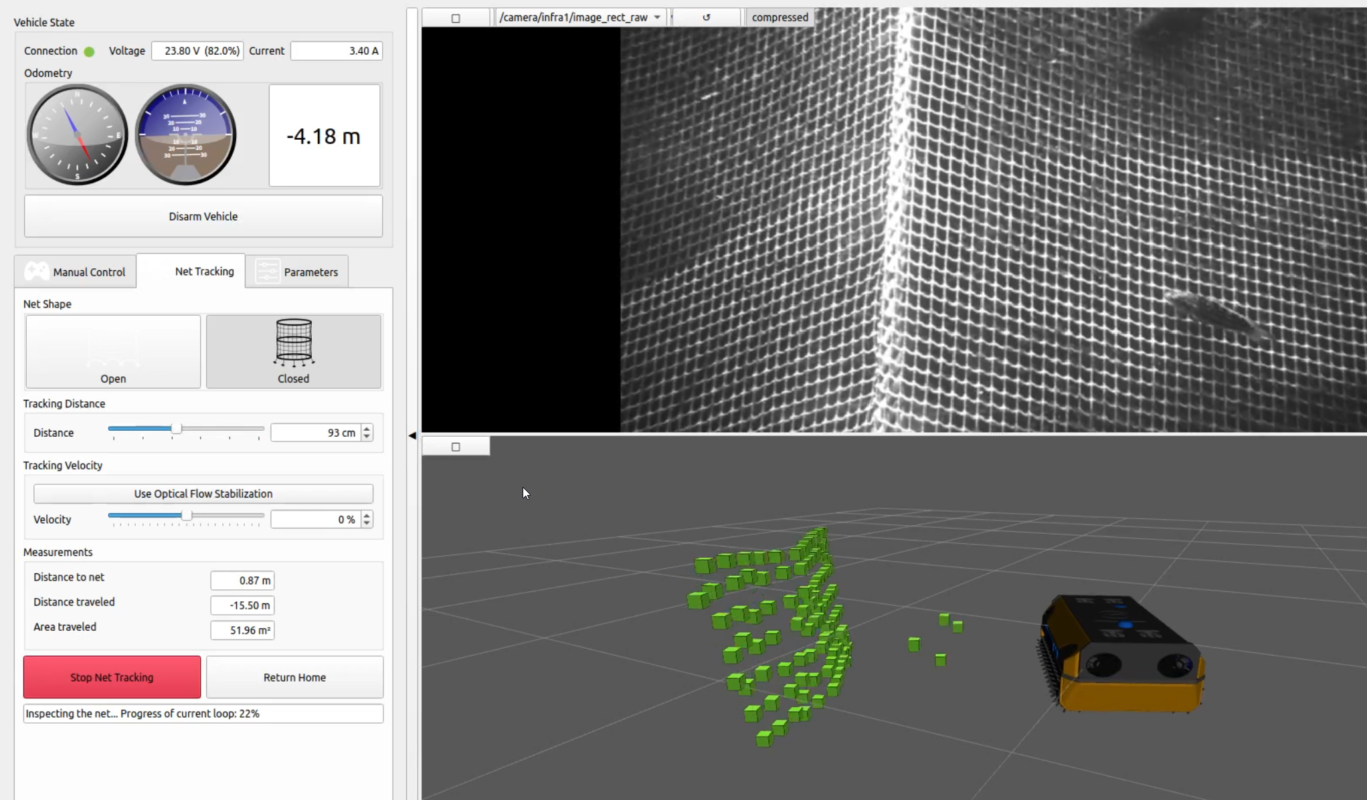
Image above shows the current GUI that allows for changing distance to net and velocity during the autonomous operation. The lower visualisation shows the drone position relative to the net. The green blocks are 3D positions of the net generated from the stereo camera imagery.
As we expected, the natural state of a fish farm is more than just a orderly net. There are stitches, reinforcement ropes, equipment on the outside, algea and seaweed and fish that will interfere with a machine vision algorithm and produce false positives. This has lead us to work with AI (Artificial Intelligence) based machine vision in conjunction with a more conventional machine vision. We believe this approach will make a robust and efficient automatic inspection tool.
We are really pleased with the development progress and are exited to continue the work.
We are currently working on new machine vision based net inspection algorithms that combine both conventional and artificial intelligence (AI) based machine vision. The project is partially funded by FHF – Norwegian Seafood Research Fund and the tools developed with help the aquaculture industry reduce the risk of escaped salmon.
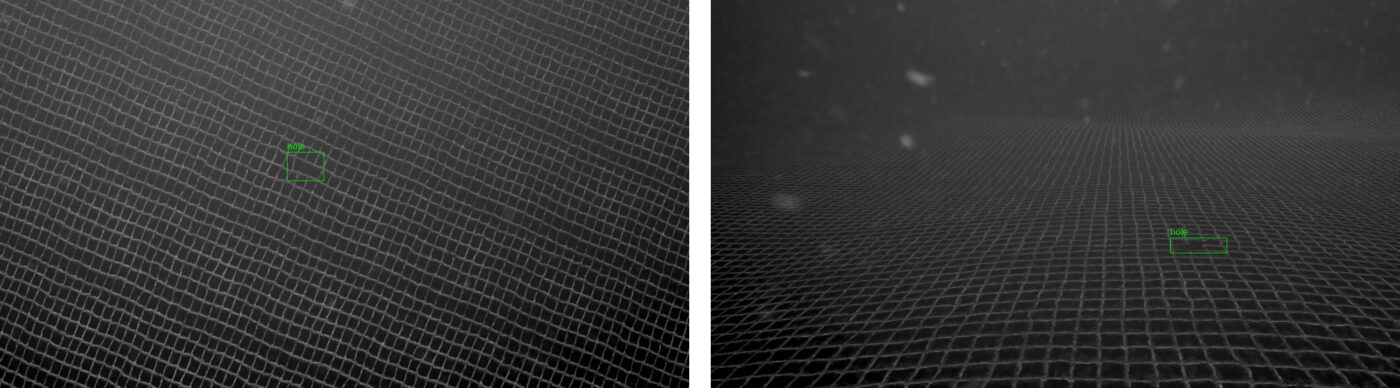
Automatic detection of damage to fishing nets is difficult to achieve with conventional machine vision algorithms. Weak contrast and poor visibility due to swirling debris and algae lead to a lot of false positive hole detections. The use of neural networks seems promising in dealing with these difficult conditions.
Due to the large variations in water quality, net shape and foreign objects present at an aquaculture facility, we believe that using a combination of AI based and classical machine vision will give the best results. The system has to both be able to detect small holes before they represent a risk of escape and also not result in too many false positives.
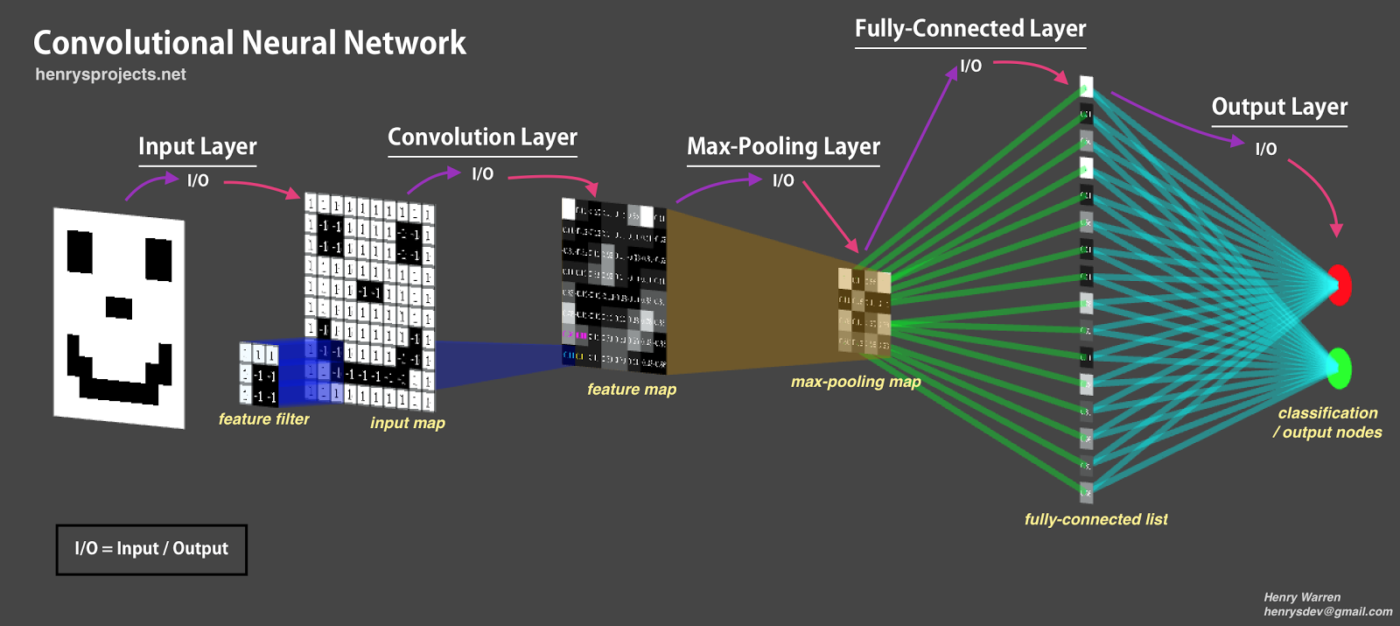
The AI-based machine vision utilize Convolutional Neural Networks (CNN) and deep learning, where you present the training algorithm with tens of thousands of annotated images. Check out this nice article written by Henry Warren, that explains the CNN technology in an intuitive way.
The training takes up to 24 hours on a powerful server, and the result is a machine vision algorithm that is so efficient that it can run on a micro computer without access to the original dataset. The new machine vision has to be tested thoroughly in different conditions as there are a lot of pitfalls related to this technology. The prototype system will therefore first be used in combination with conventional inspection to prove its effectiveness.

The decline in stocks of sea trout and wild salmon on the west coast of Norway has highlighted the need for a autonomous, non-destructive sampling method. For this reason, fish biologist at NORCE LFI are currently developing a trap with the overall goal of recording wild fish for research or conservation purposes.
Mohn Technology contribute with our high resolution FRS camera applying AI to detect passing fish. This new solar powered surveillance system was just deployed at Dale, Norway. The camera system is designed to use as little power and data traffic as possible, and the solar system was assembled and tested at Mohn Technology before deployment.
The system allows the researchers at NORCE LFI to get information about fish population and migrations directly to their computers from remote areas without access to electricity, and we hope more systems like this can aid research in this important field.

Mohn Technology is pleased to receive 5MNOK grant from FHF – the Norwegian Seafood Research Fund to develop a new autonomous net inspection drone for the aquaculture industry.
The drone will be a new tool to help fish farmers inspect their net pens more often and effective to a lower cost than diving and conventional ROV based inspection. An autonomous underwater vehicle (AUV) is a very complex product, that will demand a lot from our developer team. Mechanical and cybernetics has to work hand in hand in order for the AUV to work efficiently and effective under difficult conditions.
The AUV will be battery powered without umbilical, to reduce the risk of entanglement in existing equipment in the facility. Navigation will be based on a mixture of machine vision, compass and IMUs (Inertial Measurement Unit). The customer will gain access to reports and status via a web portal.
We are really looking forward to start on this project, as it is both very interesting and fits our company profile well!
Many thanks to FHF for the trust and support!

Mohn Technology has in cooperation with UiB Department of Informatics and masters student Oda Inanna Klemetsdal Stene started a project regarding AI based image segmentation. Oda will work on creating a new machine vision tool for the fisheries industry that will increase profits and reduce waste. We are looking forward to the collaboration.
If you wish to write bachelor or masters thesis with us, please contact magnus (at) mohntechnology.no

Mohn Technology has just been awarded a multi-million kroner grant from Innovation Norway to fund the development of the next generation automated net cleaning tools for the aquaculture industry.
The new product will increase fish welfare and reduce mortallity rate, in combination with greatly reducing CO2 and copper emissions.

Mohn Technology has just installed a tailor made camera setup for a underground hydroelectric powerplant intake. The project includes consultant work and custom made software development. Our customer, Hafslund ECO, are researching life in their tunnels.
We are happy to start a very cool project with Hafslund ECO!

NORCE Research has installed a new FRS camera in the Bolstad River. It was important to get the system up and running before the spring flooding due to snow melting.
The system was installed by NORCE field biologists, who bolted the durable stainless steel frame to a large boulder . The boulder was then moved to deeper waters. The frame / bracket is designed to withstand heavy impacts by objects that float down the river.


