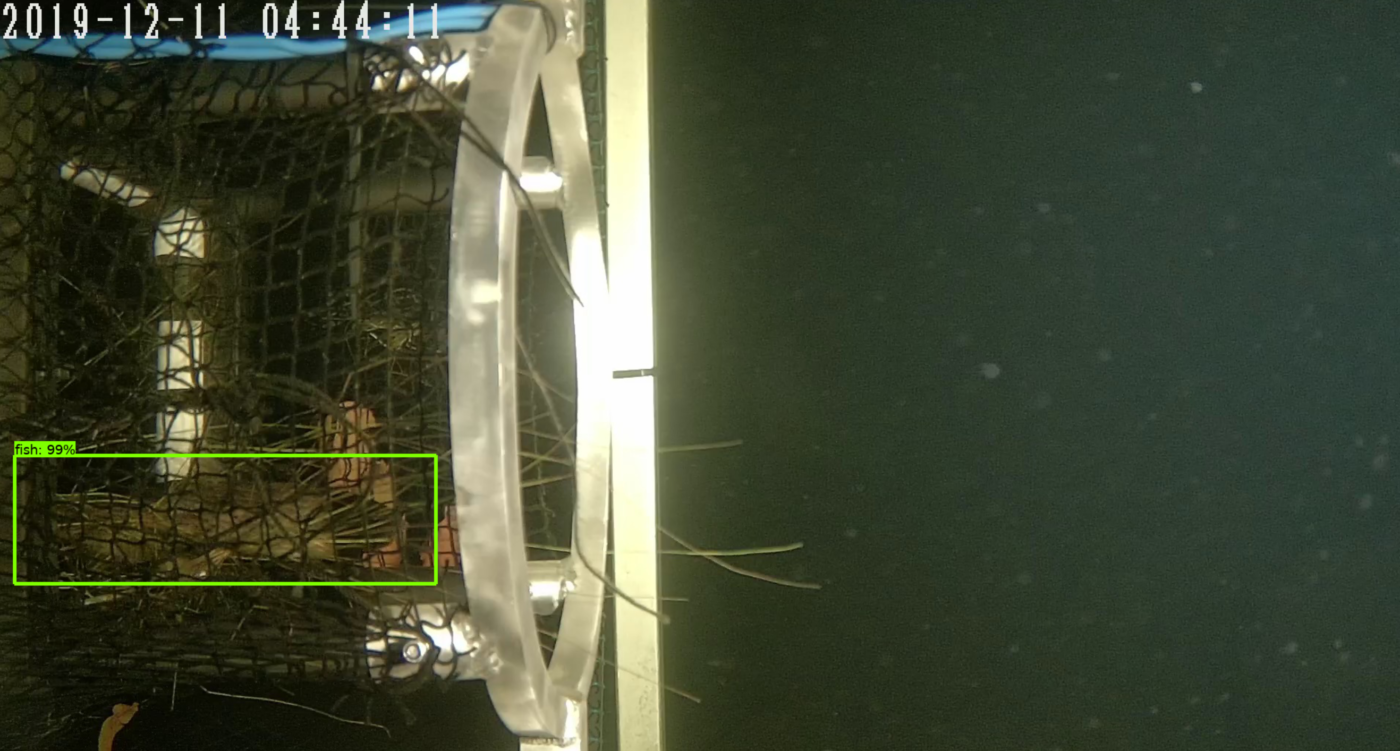
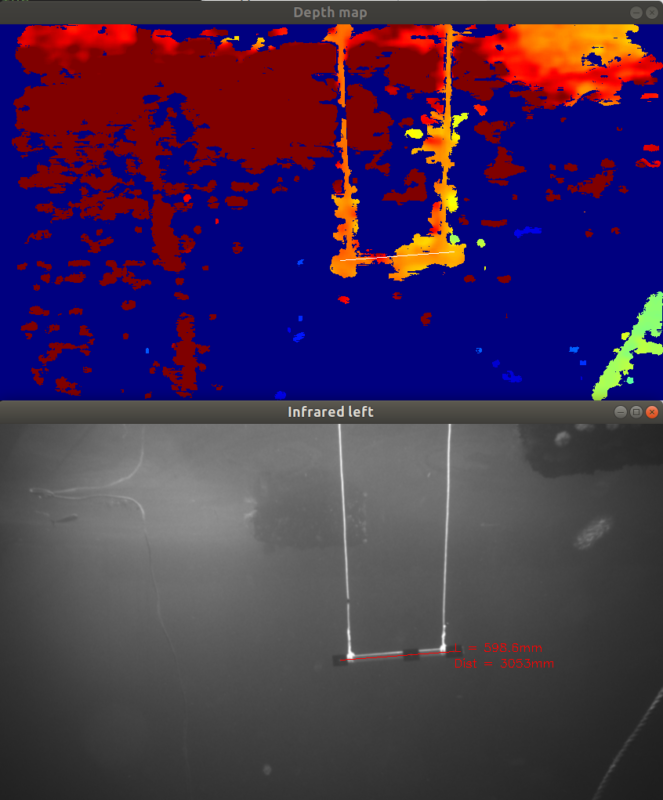
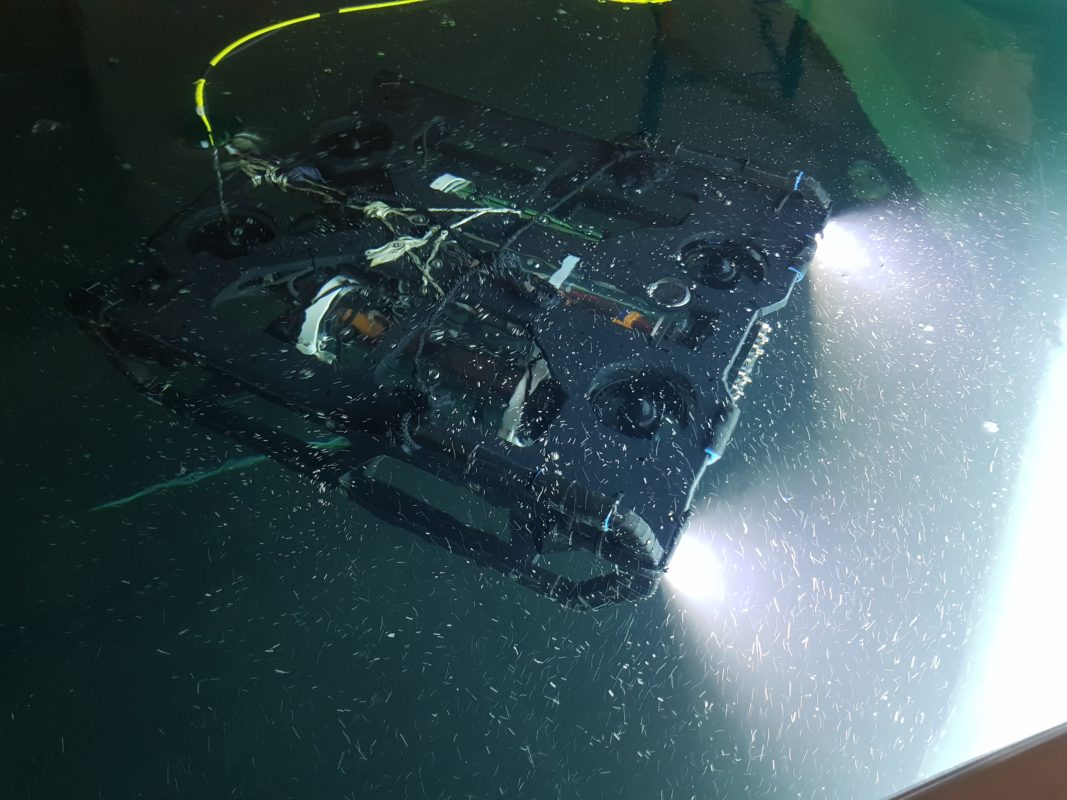
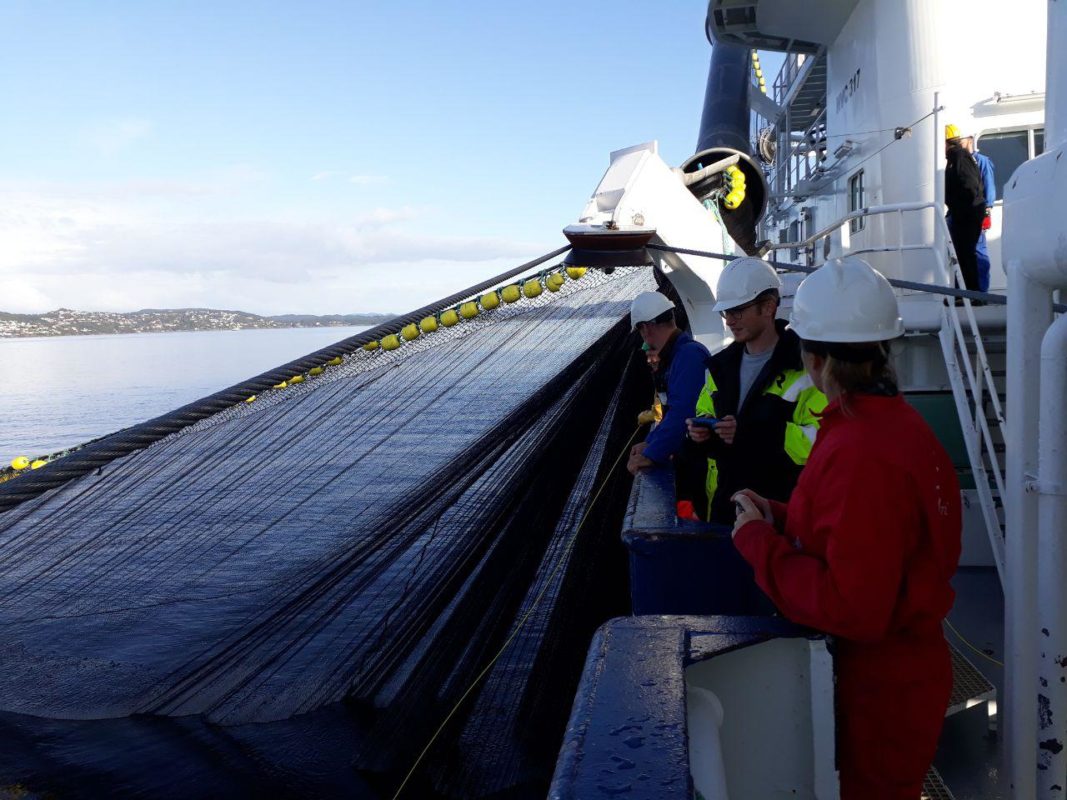
Mohn Technology and the Norwegian Institute of Marine Research (IMR) are working together to create new tools to improve the accuracy of purse seine fisheries. The project consists of many technological advancements, and Mohn Technology will contribute with our machine vision and remote controlled vehicle knowledge.
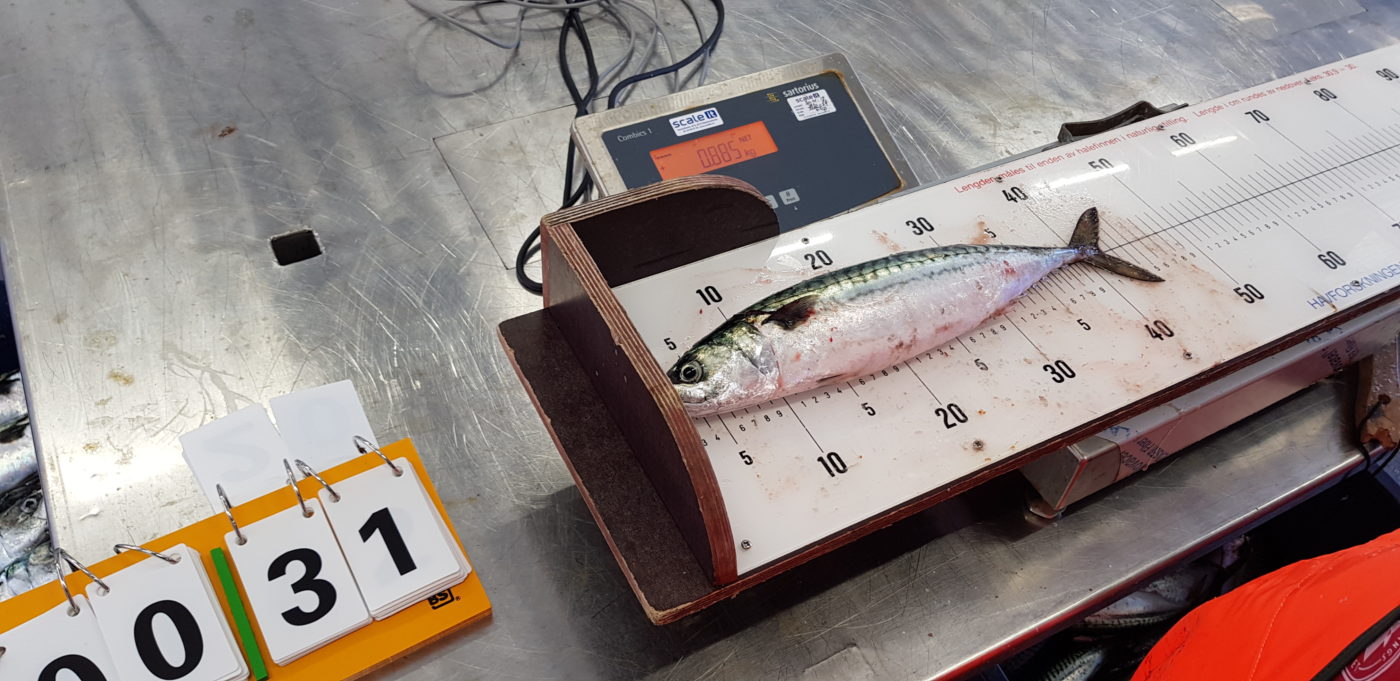
The results will help the fishing industry increase their pre-catch knowledge about the fish and improve profits. The tools can also be used by researchers who wish to learn more about the pelagic fish population.