Mohn Technology has just installed a tailor made camera setup for a underground hydroelectric powerplant intake. The project includes consultant work and custom made software development. Our customer, Hafslund ECO, are researching life in their tunnels.
We are happy to start a very cool project with Hafslund ECO!
NORCE Research has installed a new FRS camera in the Bolstad River. It was important to get the system up and running before the spring flooding due to snow melting.
The system was installed by NORCE field biologists, who bolted the durable stainless steel frame to a large boulder . The boulder was then moved to deeper waters. The frame / bracket is designed to withstand heavy impacts by objects that float down the river.
In a cooperation project with NORCE Research, we have delivered our two first pilot systems of the FRS cameras to BKK. BKK, who is interested in the local fish population and migration patterns, has installed the systems at two suitable fish ladders. We are looking forewards to working together with both BKK and NORCE to further develop the system and implement customer ideas and requirements.
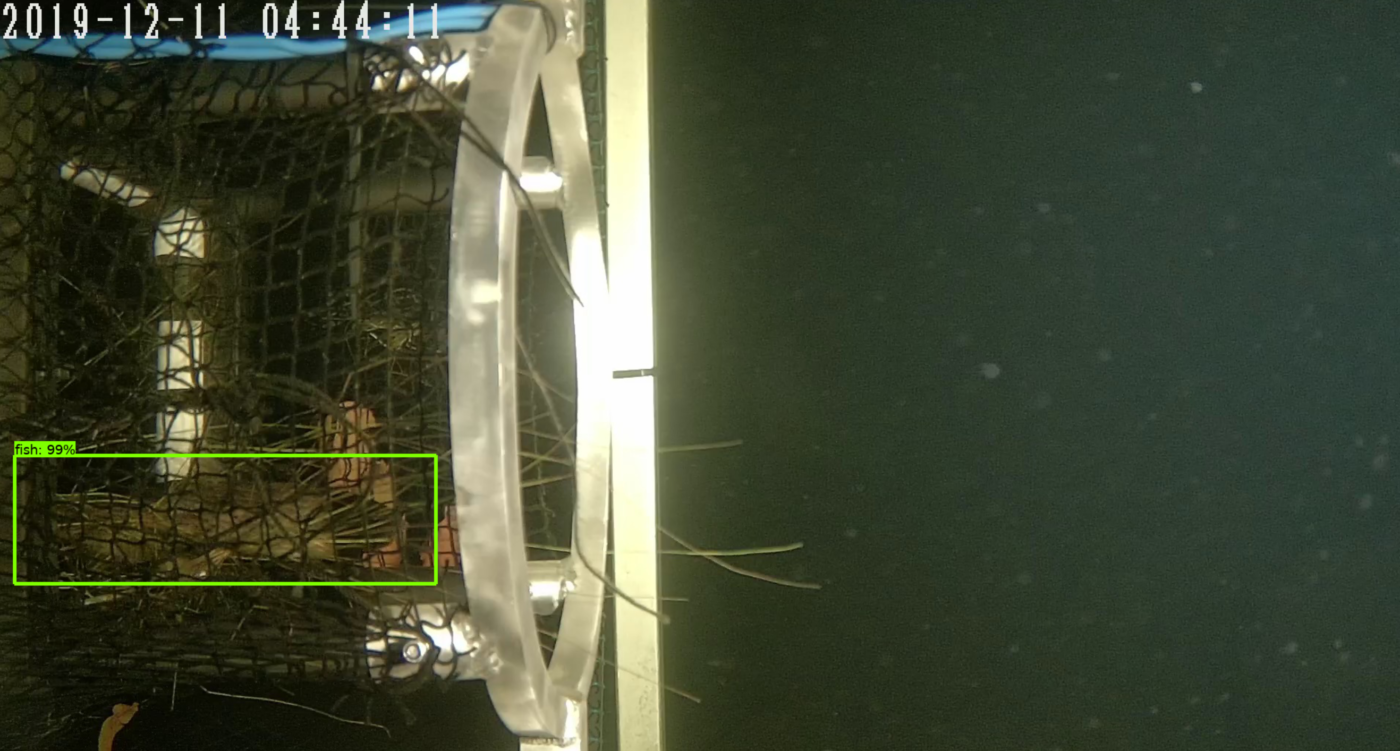
Mohn Technology is continuously working on testing and improving our machine vision algorithms for our different camera systems. After we completed a prototype test of our FRS camera (Fish Research System) this winter with NORCE LFI at Byglandsfjord, we got new footage to test.
Machine vision is one of the most important aspects of the FRS camera, and high precision algorithms help us deliver the best possible results. The FRS allows the user to efficiently monitor underwater life with greatly reduced manual data processing efforts.
This version was trained on a small data set, but the results were pretty impressive. The machine vision algorithm detects fish that are hard to see manually (especially those inside the net).
The system provides both still images and video, which makes it easy to verify and classify the fish.
Theis particular setup, with a fishing net funneling fish past the FRS camera, is used by NORCE to research fish population in lakes and fjords. It is one of many ways to use the FRS camera to gather data about marine life.
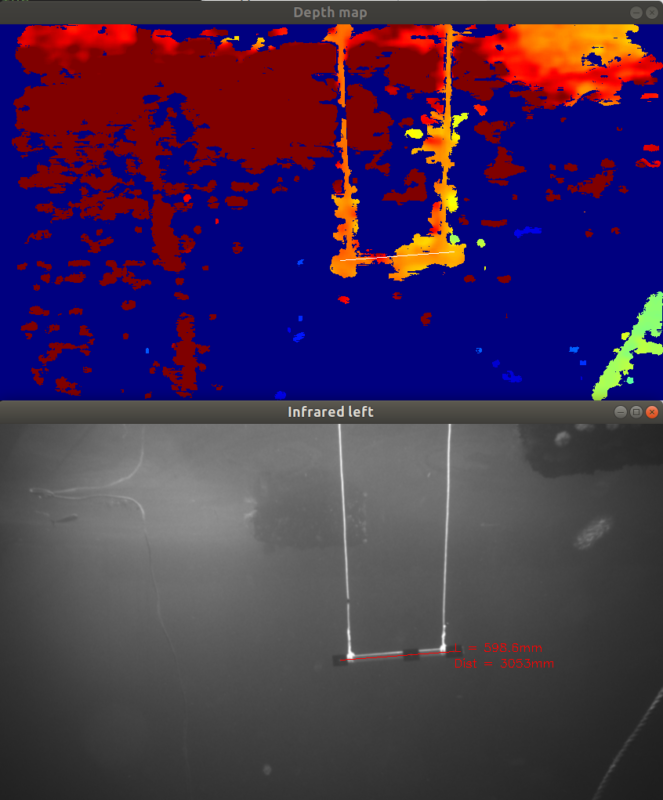
Mohn Technology is currently testing an underwater stereo camera system with Institute of Marine Research. The accuracy testing performed this time was done by comparing the distance between the white dots on a calibration bar to the camera based measurements. The distance between the dots is 596,4 mm, and most measurements had a margin of error around 0,5%
These kinds of tests are important to verify the hardware accuracy under different conditions and improve software. Underwater machine vision measurements are more complex due to the poor light and contrast. The underwater stereo camera is a compact version of what is used in the autonomous Fish Research System (FRS)
A new and updated prototype of our autonomous Fish Research System camera was installed at a NORCE-facility in Byglandsfjorden. The object is to remotely register fish activity and test the system performance.